ТВ-5 опытная телескопическая автовышка с механическим тросово-блочным приводом на базе фургона ГЗТМ АВП-51

ТВ-5 телескопическая автовышка с механическим тросово-блочным приводом на базе фургона ГЗТМ АВП-51 4х2, полезная нагрузка на люльку 150 кг, мест: 2 плюс ? в кузове, высота подъема до 15 м, полный вес до 5.5 тонн, максимальная скорость 70 км/час.
Двигатель: ГАЗ-51 70 лс
опытный 1 экземпляр, завод автопогрузчиков г. Орел, 1962 год.












Описание оригинала

Начало выпуска:
Окончание выпуска:
Файлы

























Из разрозненных и немногочисленных источников выстраивается следующая, к сожалению подтвержденная только единственной фотографией из архива ПКБ АКХ, версия происхождения прототипа этой модели.
Разработчик: Проектно-конструкторское бюро (ПКБ АКХ) Ордена Трудового Красного Знамени (с 1971 г.) Академии коммунального хозяйства им. К. Д. Памфилова Министерства коммунального хозяйства РСФСР, г. Москва.
Справка.
В состав Академии входили следующие учреждения:
— Ленинградский научно-исследовательский институт;
— Ростовский научно-исследовательский институт;
— Калининградская научно-исследовательская станция зеленого строительства;
— Московский механосборочный завод;
— Московское проектно-конструкторское бюро;
— Уральский научно-исследовательский институт.
Изготовитель: Орловский завод автопогрузчиков Орловского совнархоза, некоторое время - Орловский завод коммунального машиностроения, Министерства строительного, дорожного и коммунального машиностроения.
Справка.
Наименования предприятия:
13 марта 1956 года «Орловский ремонтно-механический завод»,
25 августа 1959 года "Орловский завод автопогрузчиков",
6 января 1966 года "Орловский завод коммунального машиностроения",
19 мая 1967 года "Орловский завод погрузчиков",
12 декабря 1991 год ТОО "Орловское предприятие Погрузчик",
30 декабря 1992 год ОАО "Погрузчик",
с 20 февраля 2004 года ЗАО "Орелпогрузчик".
31 марта 2014 года юридически ликвидирован.
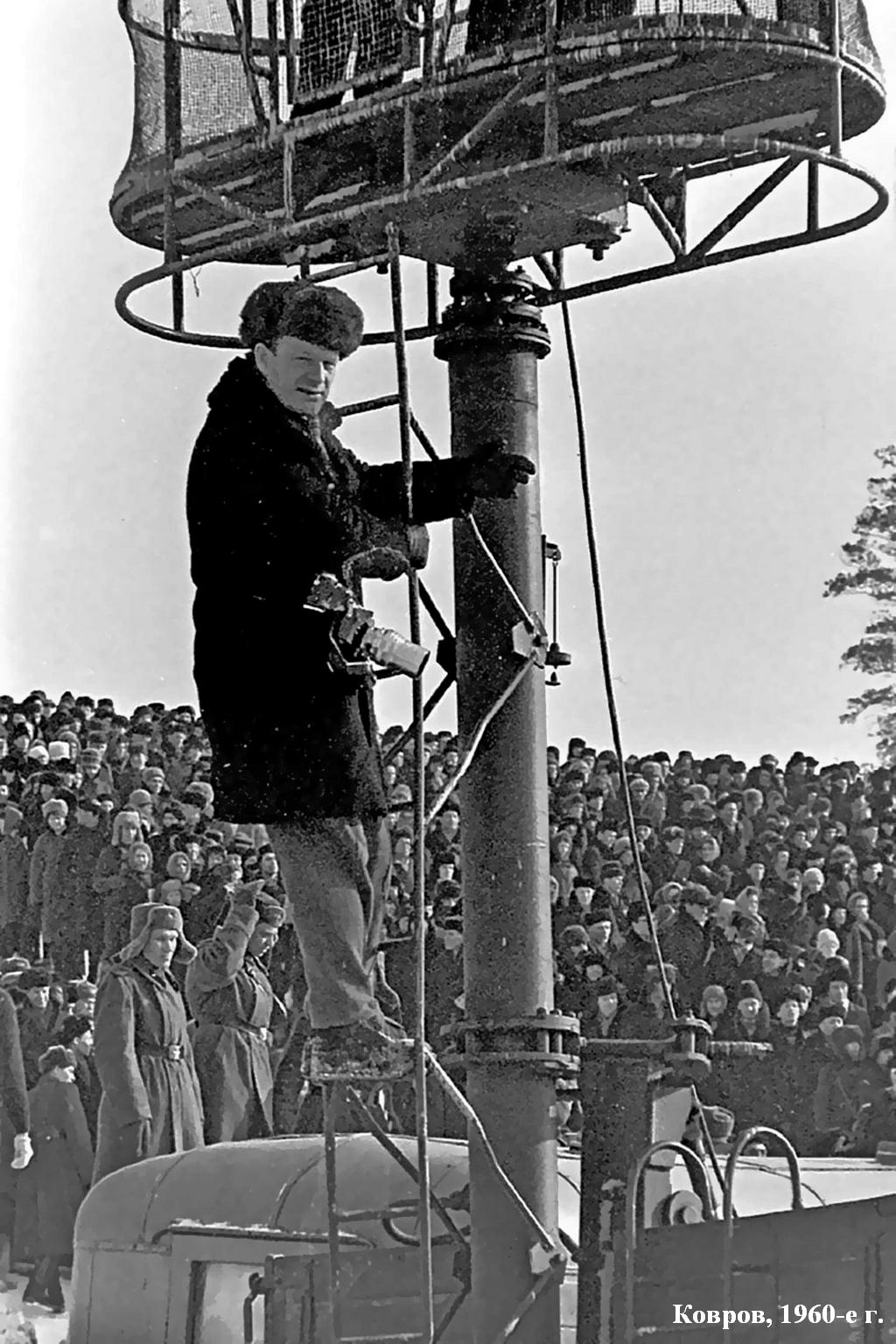
На рубеже 1950-60-х годов в ПКБ Академии коммунального хозяйства им. К. Д. Памфилова была разработана телескопическая автовышка ТВ-5 с блочно-канатной системой подъёма для монтажа, ремонта и обслуживания электрических сетей напряжением до 2500В и линий уличного освещения, а также других работ на высоте до 15 м. В 1962 году Орловский завод автопогрузчиков, выпускавший в это время вышки ТВ-1 на шасси ГАЗ-51А, создал опытный образец этой новинки. Какие причины или обстоятельства побудили создателей использовать в качестве базового шасси переделанный в пикап фургон Горьковского завода торгового машиностроения АВП-51 установить не удалось. На мой взгляд, выбор был вынужденный, так как его целесообразность, с точки зрения эксплуатации и затрат на изготовление, весьма сомнительна. Упоминаний в литературе и фотографий этой автовышки на шасси ГАЗ-51А не найдено. Однако, в дальнейшем, с началом производства Горьковским автозаводом грузовика ГАЗ-53, в Орле на его шасси освоили модернизированную вышку ТВ-5М с гидроприводом. О чем свидетельствуют приложенные фото и упоминание в учебнике для ПТУ 1977 г. В 1968 году такие же вышки начинает выпускать механический завод Министерства обороны в городе Энгельс Саратовской области.
Как работала автовышка с канатной системой подъёма.
М. Т. Постнов, Специальные автомобили. Издательство Минкомхоза РСФСР, Москва и Ленинград 1949 г.
Самым распространенным в настоящее время является телескопический подъемник, смонтированный на автомобиле ГАЗ-51. Телескопическая часть подъемника состоит из пяти звеньев 1, 2, 3, 4 и 5, представляющих собой стальные стаканы, вставленные один в другой. Звено 5 служит основанием телескопической части, в котором устанавливается остальные подвижные звенья. В верхней своей части звено 5 крепится к кронштейну 16 с помощью пальца 17. В нижней части звено имеет опорную пяту 10 с гнездом в кронштейне 12. С помощью боковых упоров 18 телескопическая часть может смещаться в ту или другую сторону относительно вертикали.
На верхнем конце внутреннего звена 1 крепится рабочая корзина 25. На верхних частях остальных звеньев на кронштейнах крепятся ролики 24, 23, 22 и 21; через каждый из них перекинут двойной канат, проходящий в канавках, сделанных по периметру роликов. Канат 31 проходит через ролики 14 и 21; один конец этого каната прикреплен к барабану 33, а второй - к нижней части звена 4 в точке 9. Один конец каната, перекинутого через ролик 22, прикреплен в точке 20 к неподвижному кронштейну ролика 21, а второй конец - К нижней части звена 3 в точке 8. Концы канатов, перекинутых через ролики 23 и 24, прикреплены также к кронштейну ролика 21, а вторые их концы - соответственно к точкам 7 и 6.
Изображенное на схеме положение подъемника является исходным для его раздвижения. В транспортное положение телескопическая часть поворачивается на пальце 17 и закрепляется на кронштейне 30. Домкраты 11служат для увеличения устойчивости при работе подъемника.
Работа телескопического подъемника осуществляется следующим образом. Выключив сцепление, включают коробку отбора мощности 36 и первую передачу основной коробки перемены передач 37, при этом карданный вал автомобиля разобщается с двигателем. Затем при небольшом числе оборотов двигателя плавно включают сцепление. Движение от двигателя передается через коробку перемены передач 37, валик 35, коробку отбора мощности 36 и карданный вал 34 на червячный редуктор 32. На одном валу по обе стороны редуктора жестко крепятся барабаны 33. При подъеме червячная шестерня, а вместе с ней и барабаны 33 вращаются по часовой стрелке (согласно рисунку}, наматывая при этом на себя канат 31. Канат передает усилие на ролик 14 (находящийся при этом в положении а), и телескопическая часть подъемника, вращаясь вокруг пальца 17, занимает вертикальное положение. После этого выключают сцепление, и подъемник фиксируется в нижней части шкворнем 13. Затем, сняв цепь 27, предохраняющую подъемник от раздвижения при подъеме, плавно включают сцепление. При этом канат 31продолжает наматываться на один из барабанов 33, проходит по ролику 14 (который теперь находится в положении б) и ролику 21 и выдвигает звено 4. Это звено, двигаясь вместе с роликом 22, выдвигает звено 3 и т. д. Звено 2 выдвигает последнее звено с прикрепленной к нему корзиной 25, в которой находятся рабочие и инструмент.
Раздвижение подъемника контролируется передвижной линейкой 19. Перед концом раздвижения выступ 15, находящийся на нижней части звена 4, упирается в выступ линейки 19, которая начинает подниматься, что свидетельствует о полном раздвижении подъемника. Во избежание выхода звеньев друг из друга на них, предусмотрены специальные выступы. Для удержания подъемника в раздвинутом состоянии червяк редуктора 32 выполнен самотормозящимся. Укладку подъемника в транспортное положение производят следующим образом. Ставят на место цепь 27, вынимают шкворень 13, канат 28 одним, концом соединяют с барабаном 33, а другим - с проушиной на подъемнике, затем, включив коробку отбора мощности и заднюю передачу основной коробки передач, плавно включают сцепление. Барабан, вращаясь против часовой стрелки, освобождает канат 31 и в то же время наматывает канат 28, заставляя, подъемник опускаться (наклоняться).